

You are here: Nature Science Photography – Image creation, Depth and Size – Space perception
Our eyes are offset next to each other and provide us with two images that overlap in a wide area but are still slightly offset to the right and left. The brain merges these two-dimensional retinal images into a single perception, which gives us the impression of spatial depth by offsetting the slight differences between the images. This so-called stereoscopic vision gives our perceptual apparatus the most important indications of the relative distances between objects and forms the basis of depth perception. As both eyes are involved in the creation of stereoscopy, it is also referred to as a binocular depth criterion.
To enable us to see stereoscopically, the visual system orients itself to the corresponding retinal points. These are the points on each retina that would coincide if both retinas were placed on top of each other and are connected to the same point in the visual cortex.
Let’s visualize this. Imagine that you are the observer on the cliff at the north rim of the Grand Canyon in
Fig. … Horopter practically and you are looking directly at point Y. In this case, the points X, Y and Z lie on the so-called horopter, an imaginary circle that runs through the respective fixation point (the point that is looked at and falls on the area of sharpest vision, the fovea centralis) and through the optical centers of both eyes. All points on the horopter always fall on corresponding retinal points, all points in front of it and behind always fall on non-corresponding retinal points. The latter, also known as disparate retinal points, are not congruent when the two retinas are superimposed, as in the first case. The points Q and R in Figure . Horopter practically fall on non-corresponding retinal points. They are important when it comes to the perception of spatial depth and that is why we want to show them in Figure … (Disparate retinal points).
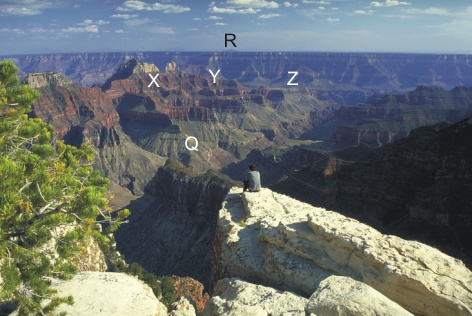
The point R is imaged on the retina in R1 and R2, the point Q in Q1 and Q2. We call the angle between R1 and R2 or between Q1 and Q2 the transverse disparity angle, and it determines the following general relationship for the perception of spatial depth: the greater the transverse disparity angle, the further away the object is from the horopter. So far, so good, but from this alone, we cannot draw any conclusions about the objects‘ exact spatial arrangement, i.e., whether they are in front of or behind the horopter. Upon closer examination of the image, we observe that the image points of R are located further inwards on the retina compared to those of Q. This observation enables us to establish a unique relationship: the outer edge areas of the retina image the objects lying in front of the horopter (point Q). We refer to the resulting disparation as crossed disparity. Conversely, the inner parts of the retinas image the points behind the horopter. Their disparation is called uncrossed.
Only the distinction between crossed and uncrossed disparation allows the visual system to draw a conclusion as to whether something is in front of or behind a fixed object. And only with this information is it able to construct a stereoscopic perception of our surroundings.
Given the specialization among the nerve cells mentioned in the previous chapters, it will come as no surprise that such particularly sensitized neurons also play an important role in the perception of spatial depth. In fact, as various animal experiments on cats and monkeys have shown, at the neuronal level we find nerve cells in the primary visual cortex and the downstream processing areas that react to stimuli from two retinal points, each separated by a certain angle of transverse disparity. These so-called binocular neurons acknowledge the stimulation of only a single eye without any reaction (H.B. Barlow, C. Blakemore & J.D. Pettigrew 1967 / D. H. Hubel & T.N. Wiesel 1970). Behavioral experiments (R. Blake & H. Hirsch 1975) have proven that these neurons actually play a role in depth perception.
The scientists Blake and Hirsch deprived kittens of the opportunity to see with both eyes during the first months of their lives. Instead, for one day at a time, the animals saw alternately with the right or left eye. However, without the normal binocular stimulation, the binocular neurons do not form any connections to other nerve cells during this formative phase of perceptual development and perish. Consequently, the animals were not able to see stereoscopically. Therefore, when our eyes perceive a specific point in space, the stimulus points located at the correct distances excite the binocular cells, which respond optimally to different angles of transverse disparity, leading us to perceive the points at different distances. However, it is not yet clear how exactly our perception system determines these corresponding points.
Next Convergence and accommodation
Main Image creation, Depth and Size
Previous Building blocks of our spatial perception
If you found this post useful and want to support the continuation of my writing without intrusive advertising, please consider supporting. Your assistance goes towards helping make the content on this website even better. If you’d like to make a one-time ‘tip’ and buy me a coffee, I have a Ko-Fi page. Your support means a lot. Thank you!
 Since I started my first website in the year 2000, I’ve written and published ten books in the German language about photographing the amazing natural wonders of the American West, the details of our visual perception and its photography-related counterparts, and tried to shed some light on the immaterial concepts of quantum and chaos. Now all this material becomes freely accessible on this dedicated English website. I hope many of you find answers and inspiration there. My books are on
Since I started my first website in the year 2000, I’ve written and published ten books in the German language about photographing the amazing natural wonders of the American West, the details of our visual perception and its photography-related counterparts, and tried to shed some light on the immaterial concepts of quantum and chaos. Now all this material becomes freely accessible on this dedicated English website. I hope many of you find answers and inspiration there. My books are on